本文内容导航
管理3、《流程运行管理》
导读 :
本章指南,重在介绍控制台流程调度的三个概念:触发器(流程触发方式)、自动化流程、执行资源调度;
流程运行权限、运行时机器人与计算机与监控计算机性能的监控、以及对流程的监控。
一、控制台流程调度
控制台可以灵活实现对自动化流程的调度、管理,支持各种策略可以实现大规模流程调度,集群式机器人协同。
理解控制台对自动化流程的调度主要有三个概念组成:1. 触发器;2.自动化流程;3. 执行资源。
触发器:即使自动化流程运行的触发条件,控制台支持人工方式触发执行、定时任务触发执行、监听数据队列消息触发;
自动化流程:即流程包;
执行资源:即自动化流程的运行环境,主要有机器人、机器人组;
二、触发器 ——流程触发方式介绍
方式1:手动
通过控制台点击立即执行, 或通过控制台API调取执行。

方式2:定时
通过配置定时任务,来实现规律性的调度执行;单个流程部署可以设置多个定时任务,实现灵活的定时调度;
(1) 定时任务开始、结束时间:
设定定时计划的生效时间,定时任务是从定时任务开始时间才开始监听时间变化,根据计划触发调度执行。
同理到达定时任务结束时间后,本定时任务停止监听时间变化,定时任务停止。
(2) 计划时间:
设定定时计划,控制台支持灵活的定时计划。
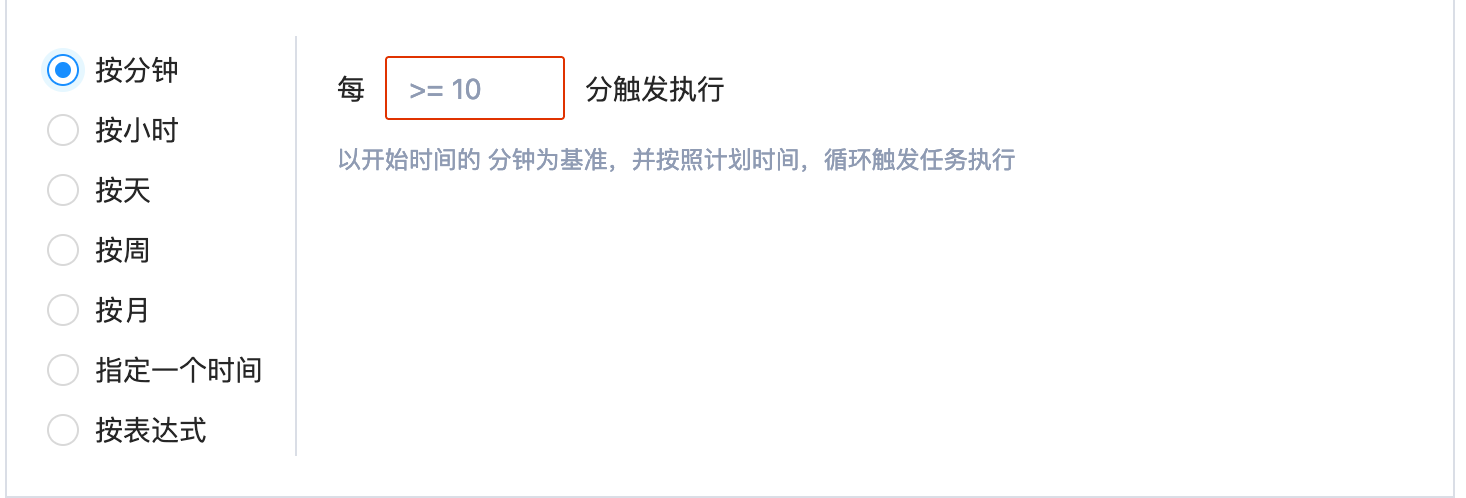
可以实现 按照分钟间隔、按照小时间隔、按天、按周、按月或者指定一个时间执行、按照linux cron表达式调度执行;
- 按分钟: 可以设置每间隔 x分钟调度执行一次;
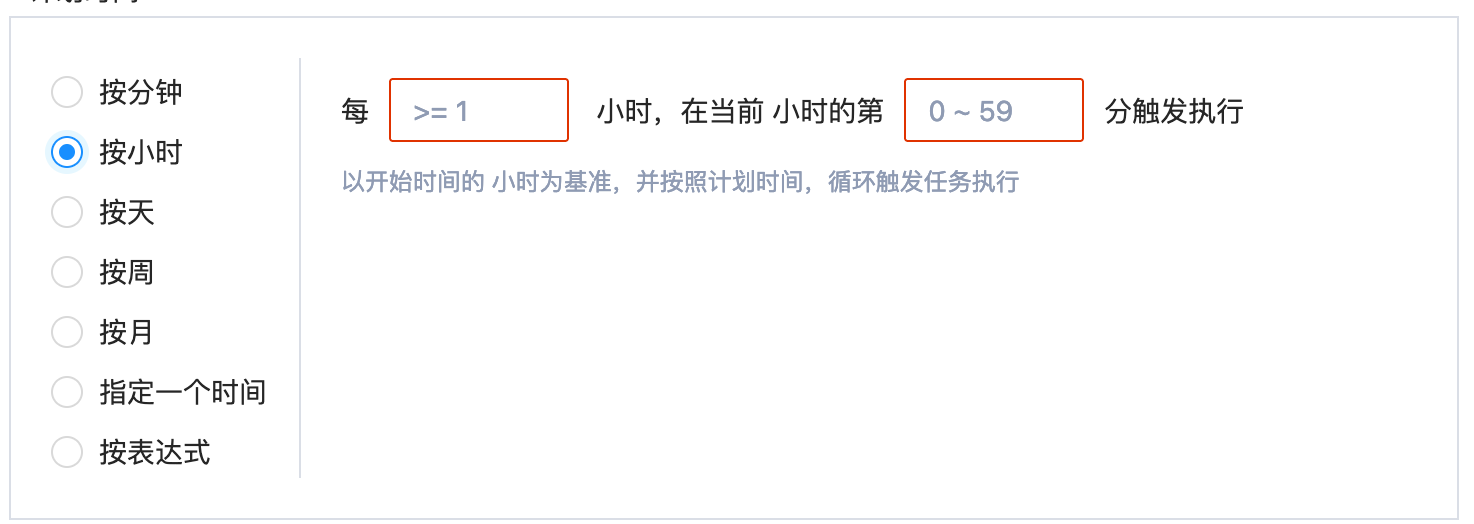
- 按小时: 可以设置每间隔x小时,在该小时对应的第x分钟调度执行一次;
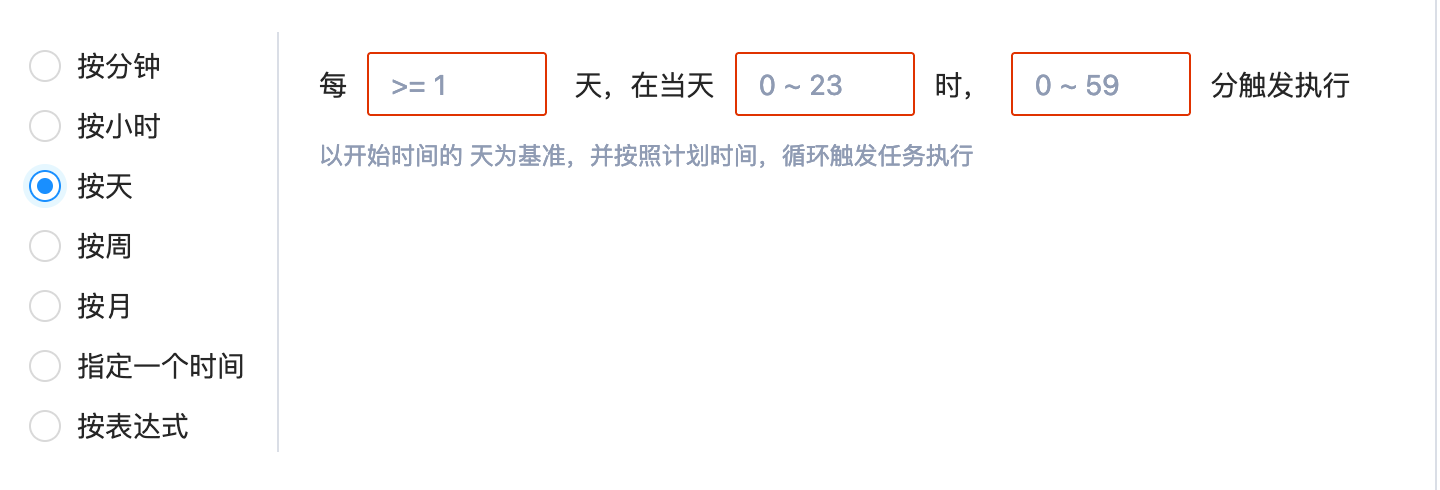
- 按天: 可以设置每间隔x天,在当天的xx小时xx分执行调度一次;
- 按周: 可以设置每间隔x周,在当周的周x的第xx小时xx分执行调度一次;

- 按月: 1,可以设置每间隔x月,在当月的第xx天的第xx小时xx分执行调度一次; 2,可以设置每间隔x月,在当月的倒数第xx天的第xx小时xx分执行调度一次; 3,可以设置每间隔x月,在当月的第x个周x执行调度一次;

指定一个时间:指定一个时间点,执行一次;
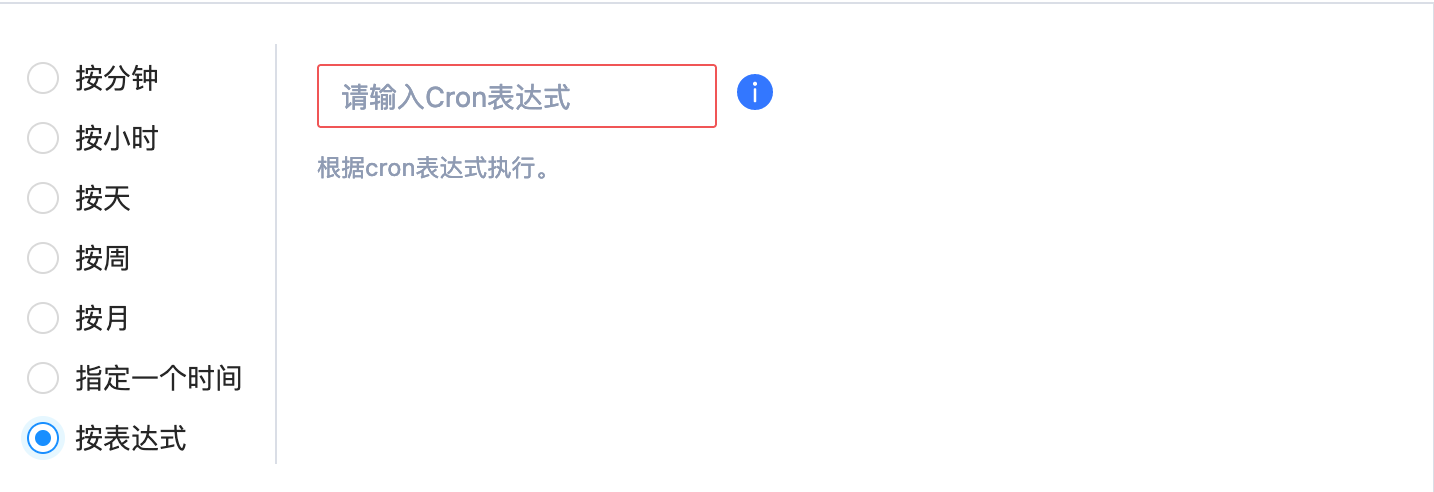
按表达式: 可以设置Linux Cron表达式,实现基于Cron表达式的执行调度;
方式3:任务队列
可以通过设置控制台的任务队列,关联需要执行的流程部署,设置处理队列消息的策略实现对消息的监听。
在流程中可以使用发送消息组件,发送消息到任务队列,实现按照消息队列触发调度。
任务队列消费消息支持多种策略:
- 多个消息排队时,立即触发新的流程部署;
- 多个消息排队时,排队等待流程上一个流程部署执行结束;
- 多个消息排队时,如已有对应部署在执行,则抛弃排队的消息;

三、执行资源调度
执行资源最小单位是机器人,多个机器人可以设置为一个机器人组;
- 任务调度方式1:指定到多个机器人
创建流程部署,可以指定到多个机器人来执行,调度时候,可以根据指定的机器人列表寻找一个可用机器人来执行自动化流程;
指定多个机器人执行,当执行资源被占用时,可灵活设置以下调度策略:
- 等待可用资源ready后,执行;
- 放弃本次调度
- 任务调度方式2:指定到机器人组
创建流程部署,可以指定到一个机器人组,调度时候,可以根据指定的机器人组中寻找一个可用机器人来执行自动化流程;
指定一个机器人组,当所有执行资源被占用时,可灵活设置以下调度策略:
- 等待可用资源ready后,执行;
- 放弃本次调度
四、流程运行权限
运行权限可以分为以下三类
- 以管理员执行:即执行时会使用管理员权限
- 以非管理员执行:即执行时不使用管理员权限
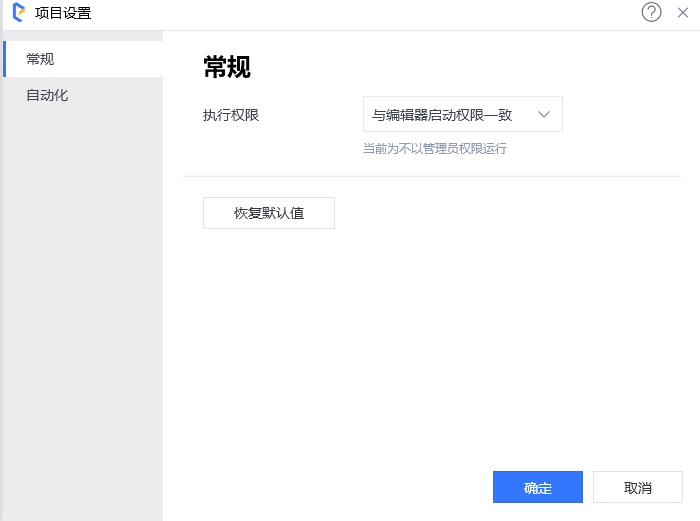
- 与编辑器启动权限一致
如果是控制台下发的流程,默认是非管理员(即选择更安全的方式)
如果是在机器人上执行,则取决于Robot.exe进程的权限,通常的以管理员权限执行的
流程执行权限,取决于编辑器中对于流程包的设置,编辑器中设置项目的运行权限位置在,项目名右键->项目设置->常规->运行权限
五、运行监控入门
(1) 机器人与计算机
一个安装了机器人的计算机,其中每个windows用户能够连接到控制台上不同的机器人,即一个计算机上会存在多个机器人。
(2) 监控计算机性能
在运维监控工作开始前,首先需要确定监控的目标,也就是确定一个具体的计算机作为监控对象。一般来说,在控制台中找到指定的计算机进行监控,有以下两个途径:
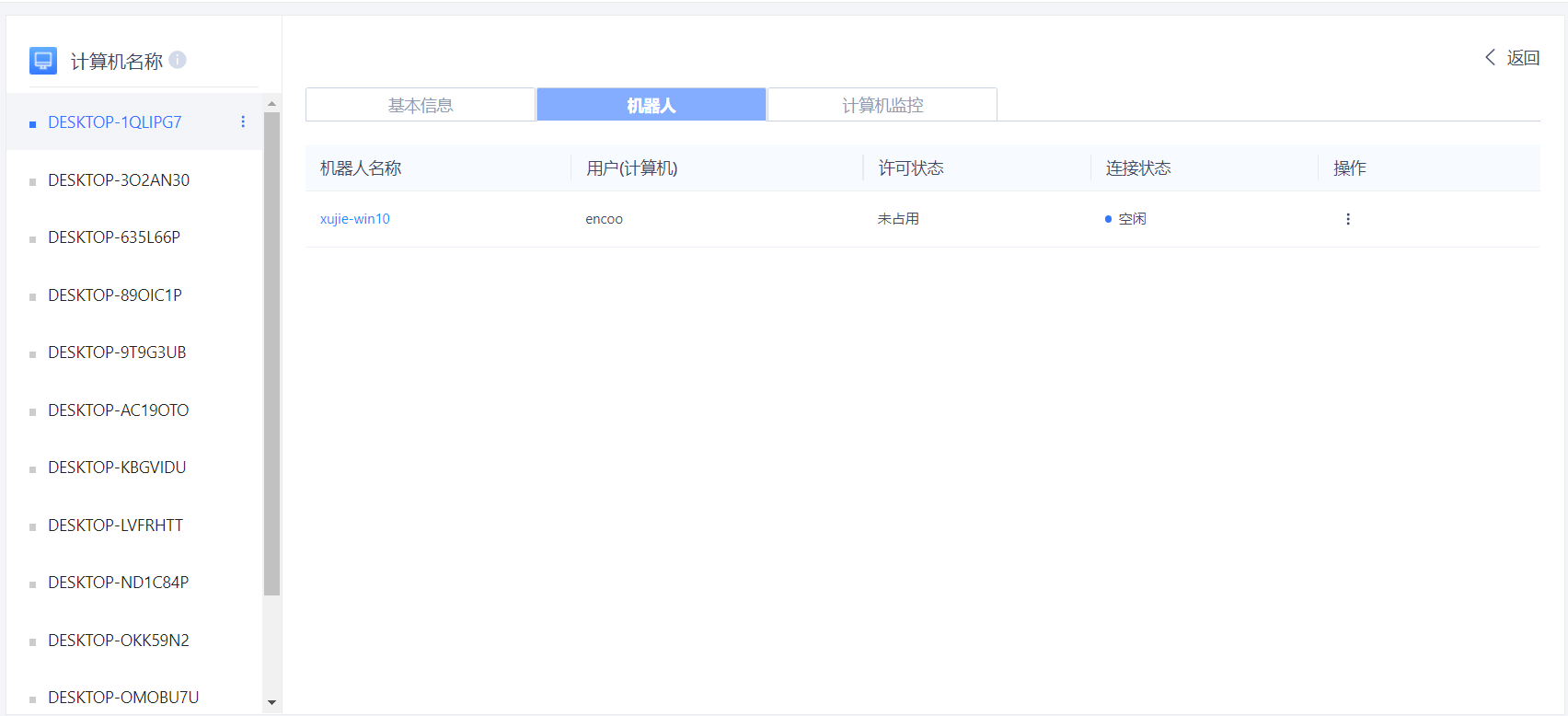
- 途径1:根据机器人去寻找 在已知要监控某个机器人所在计算机的场景下,首先需要进入机器人管理页面,通过查询功能,找到该机器人

在找到指定的机器人后,点击计算机列的超链接,即可跳转到该计算机的详情页面。
注意: 这种方式需要保证机器人与控制台已建立了连接,如果是断开状态,则无法进行跳转。
- 途径2:根据计算机去寻找 在已知需要监控的计算机信息时,可以直接前往计算机管理页面进行查询,找到要监控的计算机

在找到指定的机器人后,点击计算机列的超链接,即可跳转到该计算机的详情页面。
在进入计算机详情页后,有三个选项卡,能够分别从不同的维度来查看该计算机当前的情况
维度1:基本信息,包含以下计算机信息
- 硬件规格(CPU型号、内存容量、硬盘容量)
- 软件状态(操作系统、系统运行时长、内存使用量、硬盘使用量)

- 维度2:机器人,当前部门下已连接到当前控制台的机器人列表
- 维度3:实时监控,当前计算机的实时信息图表,包含以下内容:
- CPU使用率
- 内存使用率
- 磁盘读写
- 网络传输

六、流程监控
开发并上架 一个ViCode 应用,“已上架”的ViCode 应用,会占用许可,即当上架一个应用,则”许可证管理“下许可的“已绑定量”会+1。 同时,用户亦可在”许可证管理“下移除应用,进而收回一个许可。
关于总体监控,详见总体监控产品说明
关于机器人监控,详见机器人监控产品说明
关于机器人组监控,详见机器人组监控产品说明
关于机器人运行统计表,详见机器人运行统计表产品说明
关于用户流程统计表,详见用户流程统计表产品说明