本文内容导航
机器人监控
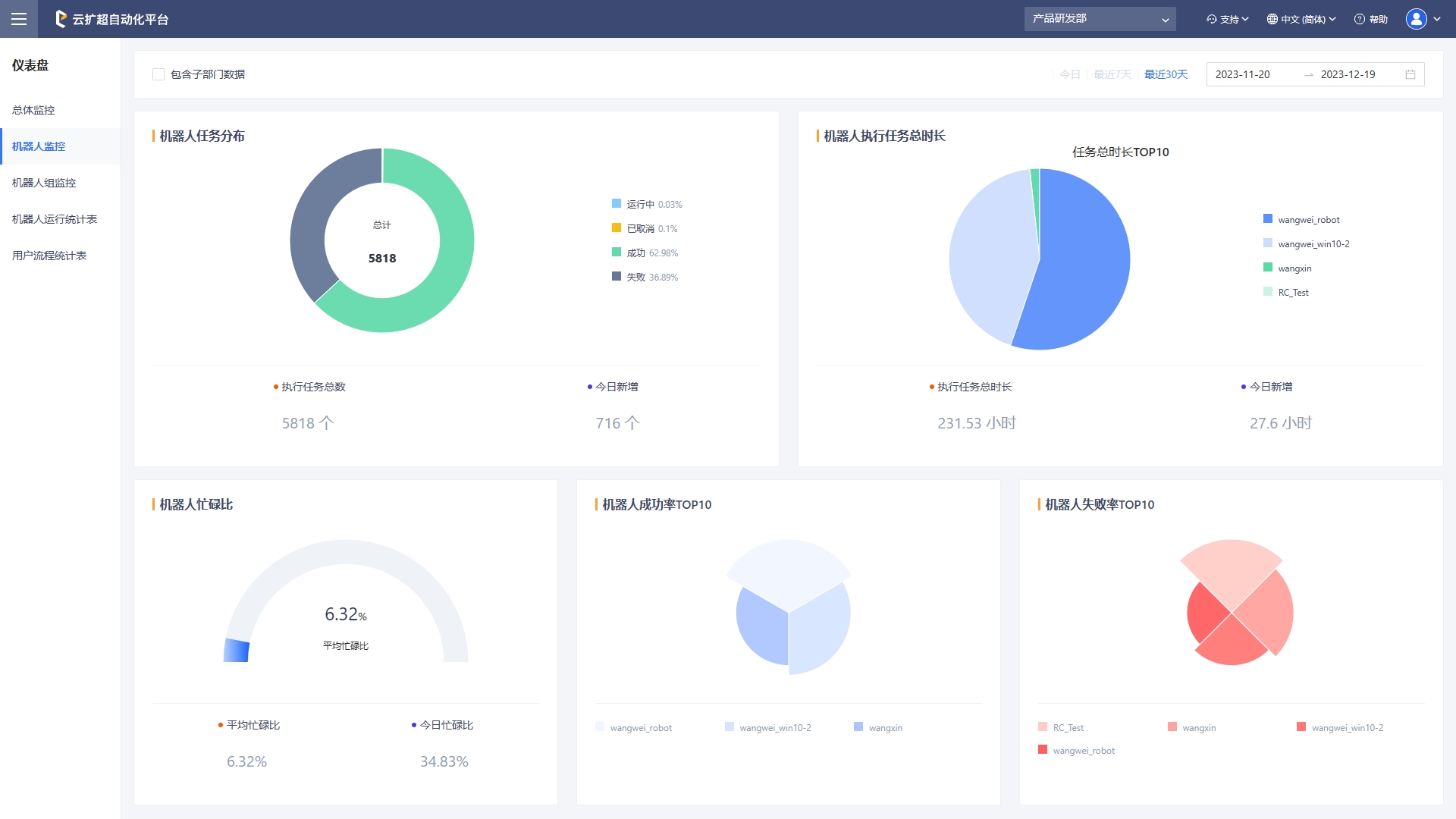
机器人监控,用户可以按今日、最近 7 天、最近 30 天或自定义时间段,从多维度查看机器人运行状况,具体如下图所示。
机器人任务分布
- 机器人任务分布(饼状图): 在指定时间区间内,统计机器人执行任务状态的数量分布,状态包含等待中、运行中、已暂停、已取消、成功、失败。统计任务状态。
- 执行任务总数: 在指定时间区间内,机器人执行任务的总数,任务总数以runinstance为计算单位(如一次job可能包含3次错误重试的runinstance)。
- 今日新增: 今天内,机器人执行任务的总数,任务总数以runinstance为计算单位(如一次job可能包含3次错误重试的runinstance)。
说明:
1,机器人包含当前部门下的机器人和从其他部门分享来的机器人。
2,默认统计当前部门,同时也支持[当前部门+包含子部门]的统计方式。
3,详见名词解释:任务job与执行实例runinstance
机器人执行任务总时长
- 任务总时长TOP10(饼状图):机器人作为执行目标,并以机器人为统计单位。在指定时间区间内,机器人执行任务时长较高的前10名机器人。
- 执行任务总时长:在指定时间区间内,机器人执行任务的总时长,时长以runinstance的执行时间为颗粒度计算(如一次job可能包含3次错误重试的runinstance),一次执行时间=结束时间-开始时间。

- 今日新增:今天内,机器人执行任务的总时长,时长以runinstance的执行时间为颗粒度计算(如一次job可能包含3次错误重试的runinstance),一次执行时间=结束时间-开始时间。
说明:
1,机器人包含当前部门下的机器人和从其他部门分享来的机器人。
2,详见名词解释:任务job与执行实例runinstance
机器人忙碌比
- 平均忙碌比:在指定时间区间内,机器人实际运行时间总和比上机器人饱和运行时间总和,饱和运行即机器人7*24小时无休运行。
- 今日忙碌比:今天内,机器人实际运行时间总和比上机器人饱和运行时间总和,饱和运行即机器人7*24小时无休运行。
说明:
1,机器人包含当前部门下的机器人和分享来的机器人。
机器人成功率TOP10
- 机器人成功率TOP10:成功,即任务执行成功。机器人作为执行目标,并以机器人为统计单位。在指定时间区间内,机器人任务执行成功率较高的前10名机器人。
说明:
1,机器人包含当前部门下的机器人和分享来的机器人。
机器人失败率TOP10
- 机器人失败率TOP10:失败,即任务执行失败。机器人作为执行目标,并以机器人为统计单位。在指定时间区间内,机器人任务执行失败率较高的前10名机器人。
说明:
1,机器人包含当前部门下的机器人和分享来的机器人。
Copyright © 2020 上海云扩信息科技有限公司